CAPET 3ème Concours
Section : Sciences Industrielles de l’Ingénieur
Épreuve d'admissibilité
Option ingénierie mécanique
Support de l'épreuve : Robot autonome pour le désherbage viticole
Contexte et présentation du sujet
Mise en situation
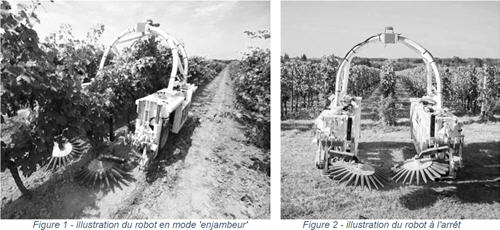
Le robot autonome polyvalent TED, développé par la société Naïo, est un outil enjambeur de désherbage mécanique des vignes. Son intérêt principal est de décharger de tâches pénibles et chronophages les viticulteurs et vignerons.
TED, figures 1 et 2, propose un désherbage 100% mécanique ce qui limite l’utilisation d’herbicides habituellement utilisés. Son passage fréquent offre un travail d’entretien régulier.
Ce robot est l’un des premiers robots électriques entièrement autonome sur le marché pour le désherbage précis et efficace de l’inter-cep.
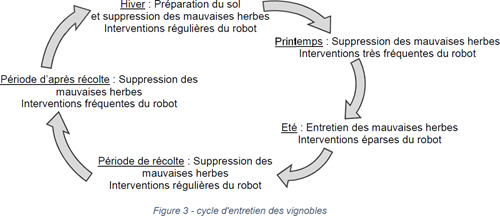
L’entretien des sols d’un vignoble, inter-rang ou sous le rang, est l’une des principales contraintes des vignerons. Il est admis que la présence d’herbes en phase végétative nuit grandement au vignoble, aussi bien sur la quantité que sur la qualité du raisin. Les viticulteurs perdent beaucoup de temps au binage, sarclage et tonte répétés, en saison ou hors saison, comme l’indique le diagramme de la figure 3.
Une alternative depuis la fin des années 1940 est l’utilisation de produits chimiques (herbicides). Ces produits ont permis un gain de temps sur des opérations de désherbage, mais ils ne garantissent pas la fertilité du sol sur le long terme et entraînent des risques de pollution des eaux. Ils ne favorisent pas non plus l’activité biologique des sols et la biodiversité dans la parcelle.
Entre la volonté d’arrêter l’utilisation des herbicides d’un côté et le problème de recrutement de personnel qualifié pour réaliser un entretien manuel sous le rang de l’autre, le robot TED a été conçu.
Ce robot permet d’enlever l’herbe au pied du cep pour favoriser la pousse du raisin. Il réalise un entretien plus fréquent et respectueux du cep car le cavaillon (motte de terre sous le cep de vigne) doit rester meuble et facile à travailler. De plus, étant autonome, il libère le viticulteur qui peut se consacrer à d’autres tâches.
Cycle d’utilisation
L’utilisation et la mise en route du robot TED est assez simple :
- Étape 1 : mise en place du robot sur la parcelle ;
- Étape 2 : cartographie des parcelles technologie RTK par GPS, manuellement ou par drone ;
- Étape 3 : réglage de la vitesse et montage des outils ;
- Étape 4 : lancement du cycle en autonomie du robot.
On peut atteler au porteur (partie tractée du robot) un ensemble d’outils mécaniques traditionnels comme des disques ou des décavaillonneuses.
Le robot est léger. Sa masse avec outils reste inférieure à 1 tonne. Il est ainsi plus léger qu’un tracteur ce qui contribue au non-tassement des sols.
Dans ce sujet, le candidat devra :
- Partie 1 : vérifier l’équipement en alimentation électrique du robot (exigence 1.1) ;
- Partie 2 : évaluer la capacité du robot TED à changer de rang (exigences 1.2.1.3 et 1.2.1.4) ;
- Parties 3 & 4 : évaluer la pertinence du choix de la géométrie du robot (exigence 1.3.2) ;
- Partie 5 : proposer une motorisation du robot afin de répondre aux exigences 1.1 et 1.2.1.2 ;
- Parties 6 & 7 : justifier de la rigidité du système de porte-outil et proposer une solution alternative conformément aux exigences 3 et 4.
Les parties sont toutes indépendantes et peuvent être traitées dans n’importe quel ordre.
La plupart des formules et modèles de calcul sont donnés dans les annexes.
La problématique générale est la validation du robot actuel au vu des exigences demandées, mais surtout, dans une optique d’industrialisation, le candidat est amené tout au long de ce sujet à réfléchir sur des pistes d’amélioration et de simplification des solutions actuelles afin de proposer un robot amélioré.
